
در این قسمت از آموزش های نمایندگی زیمنس با نحوه کار سیستم های طرکیبی و طراحی دو مثال که باعث درک شما از سیستم های ترکیبی و چگونکی عملکرد آنها و کاربردشان در اتوماسیون های صنعتی مانند PLC های زیمنس.
طرز کار سیستم
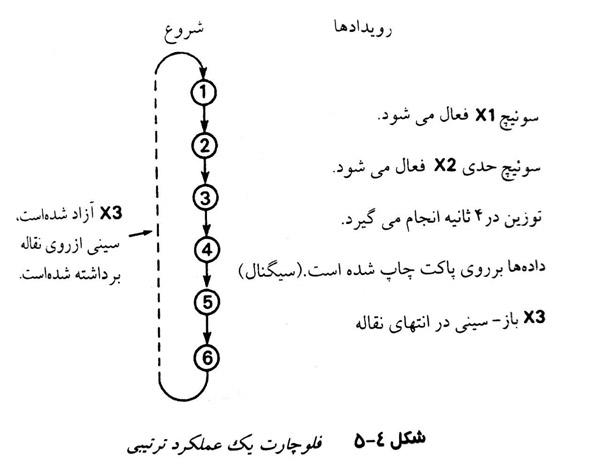
هر دو تسمه نقاله A . B توسط سوئیچ X1 آغاز به کار می کنند. هنگامی که یک سینی از تسمه A به سوی B حرکت کرده است و روی ترازو جا می گیرد، هر دو تسمه با فعال شدن X2 متوقف می شوند. کار توزین ۴ ثانیه وقت گرفته، سپس وزن اندازه گیری شده و سایر اطلاعات مربوطه، توسط یک چاپگر جوهرافشان ]چاپگری که به وسیله پخش مرکب توسط نازل های قرار گرفته بر روی آن علایم را چاپ می کند[ حال تسمه B حرکت کرده و سینی را به انتهای خط نقاله می برد. در این جا سینی، سوئیچ X3 را تحریک کرده و تسمه متوقف می شود. زمانی که سینی از روی تسمه برداشته می شود، X3 باز و هر دو تسمه جهت جا به جایی سایر سینی ها به روی ترازو شروع به حرکت می کنند؛ سپس روند فوق تکرار می شود.
این توصیف، بیانگر یک ترتیب و توالی از حالت ها و رویدادهاست که می بایستی همواره به همین ترتیب اتفاق افتد و نیز چنانچه عملکرد مطمئن سیستم مدنظر باشد، بایستی آن را همیشه در نقطه معینی از روند کار، راه اندازی کرد:
حالت ۱: هر دو تسمه متوقفند، سوئیچ X1 ، off است.
حالت ۲: هر دو تسمه A . B در حال حرکتند، سینی به سمت سوئیچ حدی X2 حرکت می کند.
حالت ۳: هر دو تسمه متوقفند، سینی وزن می شود. (تایمر راه اندازی می شود)
حالت ۴: هر دو متوقفند، داده ها بر روی پاکت چاپ می شوند.
حالت ۵: تسمه B حرکت می کند و تسمه A ثابت است، سینی به سمت X3 حرکت می کند.
حالت ۶: هر دو تسمه متوقفند، سینی توسط تیغه بالابر حمل می شود.
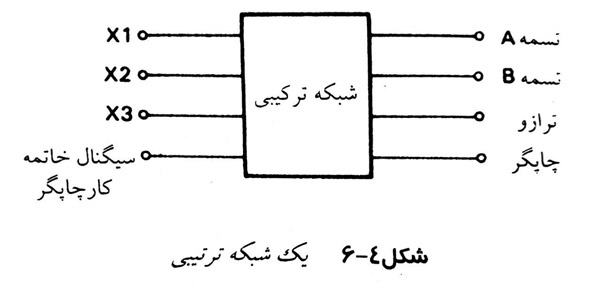
می توانیم با استفاده از یک فلوچارت یا دیاگرامی که شامل تمامی حالت های ممکن سیستم و همچنین رویدادهایی که سبب گذر یا انتقال بین این حالت ها می باشد. بسیار ساده تر به طرز کار یک سیستم پی ببریم. (شکل ۴-۵) همچنین می توانیم سیستم را به صورت شبکه ترتیبی دارای چهار ورودی و چهار خروجی نمایش دهیم. ( شکل ۴-۶)
توجه کنید که تایمر ها جزء توابع دورنی هستند و آنها را نبایستی در دیاگرام خارجی نشان داد. این دیاگرام فاقد اطلاعات کافی برای محاسبه ترکیب سیگنال های ضروری ورودی در هر لحظه، برای تولید خروجی دلخواه است. در حقیقت برای به دست آوردن یک خروجی به خصوص، ترتیب و توالی کاملی از ورودی ها مورد نیاز است. به عنوان مثال، حالت ۵ که تنها تسمه B حرکت می کند، زمانی می تواند فعال شود که فقط اگر حالت های ۴-۱ اتفاق افتد و ورودی های X1 . X2 و همچنین سیگنال چاپگر نیز اعمال شود.
به منظور نگهداری حالت های قبلی رویدادها، سیستم کنترل کننده بایستی شامل حافظه باشد. این امر امکان ثبت اعمال،
فی المثل عمل کردن و آزاد شدن سوئیچ حدی X3 زمانی که یک سینی به انتهای نقاله حرکت کرده و سپس برداشته
می شود را فراهم می آورد. سیستم بایستی این رویداد را به خاطر داشته باشد که سینی ای که سوئیچ را تحریک کرده است، از روی نقاله خارج شده تا این اطمینان را فراهم سازد که ترتیب اجرای عملیات، مسیر صحیح خود را می پیماید. در یک PLC نیاز به این حافظه را اغلب رله های نشانه گر یا رجیسترها تامین می کنند.
در یک PLC مانند PLC زیمنس، همان عناصر منطقی که برطرف کننده و عهده دار نیازهای مدارات ترکیبی می باشند، می توانند همراه با شمارنده ها، تایمرها، شیفت رجیسترها و غیره برای وظایف ترتیبی نیز به کار روند. مثال هایی از سیستم های ترکیبی و ترتیبی در بخش های آتی آورده خواهد شد.
بسیاری از توابع کنترلی، یا با استفاده از شبکه های ترکیبی، یا ترتیبی و یا تلفیقی از هر دو قابل اجراء می باشند. راه حل های مبتنی بر طراحی ترتیبی، به برنامه های کوچک تر و ساده تری نسبت به راه حل های ترکیبی معادل، منجر می شوند. علاوه بر این مقاومت بیشتری نسبت به نویز یا سیگنال های اشتباه گونه دارند. این امر بدان علت است که سیستم ترتیبی از تعدادی حالت پایدار ساخته می شوند. هنگامی که یک حالت مطمئن و معتبر رخ میدهد، اگر شرایط خروج از حالت فعلی برآورده شده باشد، سیستم تنها آن حالت را ترک خواهدکرد.
این ویژگی حالت های پایدار، به هنگام عیب یابی یک سیستم ترتیبی بسیار یاریگر است. زمانی که یک سیگنال اشتباه رخ می دهد، به احتمال زیاد سیستم در حالت فعلی باقی می ماند و سبب تشخیص و تعیین محل عیب نسبت به سیگنال های ورودی – که سبب ورود سیستم به آن حالت اشتباه شده اند و یا در آینده می شوند – خواهد شد.
مثال اول طراحی سیستم ترکیبی
قبلاً دستورالعمل های منطقی استاندارد در PLC _ NOT . OR . AND و غیره _ و همچنین بعضی از مثال های ساده از چگونگی ترکیب این نوع توابع را، برای ایجاد شبکه های منطقی معرفی کرده ایم. این بخش استفاده ار جبربول را به عنوان ابزاری برای کمک در امر طراحی شبکه ها منطقی، لحاظ می کند.
مسئله زیر را در نظر بگیرید:
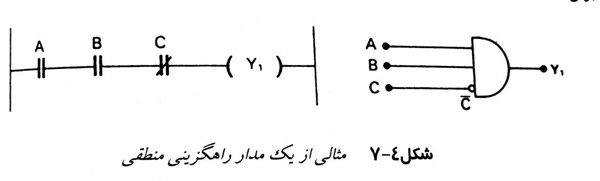
می خواهیم اگر سوئیچ های حدی B . A عمل کنند (بسته شوند) و سوئیچ آشکارساز سطح C عمل نکند، شیر Y1 باز شود.
این یک مثال ابتدایی است که است که مفهوم عبارت “تعیین یک خروجی، صرفا توسط ترکیبی از ورودی ها” را نشان
می دهد. مدارات منطقی را می توان به طور ساده و سودمندی توسط جبربول توصیف نمود. جبربول، چارچوب ساده ای را از قوانین استاندارد و روابط منطقی دو دویی فراهم می سازد. هر برنامه یا مدار منطقی را می توان به صورت معادلات بولی تبدیل کرد. این معادلات نشان می دهد که برای آن مدار، چگونه از ورودی ها برای به دست آوردن خروجی ها استفاده
می شود.
تبدیل به معادلات بولی با شروع از بالای دیاگرام نردبانی انجام می گیرد و با حرکت به نوبت به سوی تک تک شاخه ها، ادامه می یابد. این کار را بایستی کنتاکت به کنتاکت انجام داد. در مثال فوق، وقتی که همه کنتاکت ها بسته هستند، خروجی Y1 برقرار می شود. (شکل ۴-۷) به عبارت دیگر هنگامی که ترکیب AAND BAND NOT C فعال باشد، (یا ارزش صحیح داشته باشد) این عبارت، به شکل بولی A.B.C = Y1 بیان می گردد.
همین مثال می تواند برای نشان دادن مدارات با ورودی های بیشتر تعمیم یابد (شکل ۴-۸). در این شکل، در صورتی که سوئیچ C باز نباشد و (AND) شیر X عمل کرده باشد و (AND) شیر Z عمل نکرده باشد، Z و همچنین سوئیچ های A و B و (A AND B) بسته باشد، شیر خروجی Y1 عمل خواهد کرد. به عبارت بولی: A.B.C.X.Z + D.C.X.Z Y1 = که می تواند به صورت
Y1 = (A.B + D).C + X.Z مختصر شود.
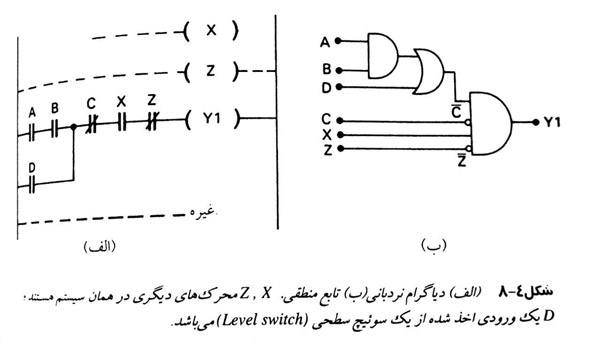
عبارت اخیر با مشخص کردن جملات مشترک در معادله، (C.X.Z) و سپس فاکتورگیری از عوامل مشترک به دست آمده است. به همین ترتیب برای هر وسیله یا المان خروجی دیگر در سیستم، عبارت مشابهی بر پایه مشخصات سیستم قابل ارائه است. در این سطح از طراحی نردبانی، شما تقریبا قادرید طرح و خطوط کلی عملکردهای مدار را مشخص نموده و آنگاه معادل نردبانی آن را تولید نمایید. معادل نردبانی سپس به دستورالعمل های PLC کد و برنامه ریزی خواهد شد. وقتی که سر و کار با وظایف منطقی ترکیبی نسبتاً پیچیده می باشد، بیشتر طراحان برنامه ترجیح می دهند که شرایط و درخواست های مسئله را قبل از تبدیل به منطق نردبانی، در قالب معادلات بولی بیان دارند. همان گونه که از شکل ۴-۸ قابل مشاهده است، ما به سادگی قادر به بیان و توصیف یک شبکه منطقی با استفاده از توابع یا علایم منطقی معادل آن می باشیم. با این توصیف، مدار فوق را می توان با عناصر زیر ایجاد نمود:
-
یک گیت AND دو ورودی
یک گیت OR دو ورودی
یک گیت AND چهار ورودی
معکوس گرها (NOTها) به تعداد لازم
این شکل از بیان نیازها و الزامات مدارات منطقی، در سادگی درک و اجرای یک مدار کمک زیادی می کند. اغلب از علایم منطقی همراه با جبربول استفاده می شود، چرا که آن ها ورودی ها را به توابع منطقی که به سادگی به عبارت های بولی تبدیل می شوند، گروه بندی می کنند. تکنیک های جبربول اغلب در مقایسه با برنامه پیش نویس اولیه، می توانند به راه حل هایی منجر شوند که از نظر توابع و المان های به کار رفته، اقتصادی تر و خوش طرح تر باشند.
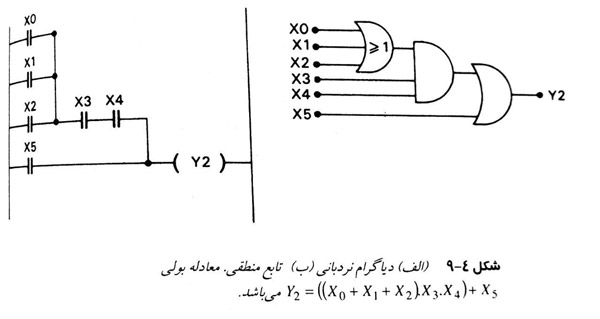
مثالی از شبکه های چند شاخه
این مدار شامل شش ورودی و یک خروجی می باشد. خروجی Y2 زمانی فعال می شود که:
ورودی های X0 یا X1 (OR) یا X2(OR) و X3(AND) و X4(AND) یا X5(OR) بسته شوند. به استفاده از پرانتزها در توضیح شکل ۴-۹ که نحوه ارتباط بین ورودی ها را نشان می دهد، توجه کنید. در حقیقت همان گونه که در شکل ۴-۹ مشاهده می کنید، ما می توانیم مدار را به صورت سیستمی که از دو گیت OR و یک گیت AND ساخته شده است در نظر بگیریم. اگر شما نسبت به روش به دست آوردن معادله بولی مطمئن نیستید، می توانید تمام راه های دیگری که خروجی Y2 می تواند برق دار شود را در مدار فوق بیابید.
مثال دوم طراحی سیستم ترکیبی
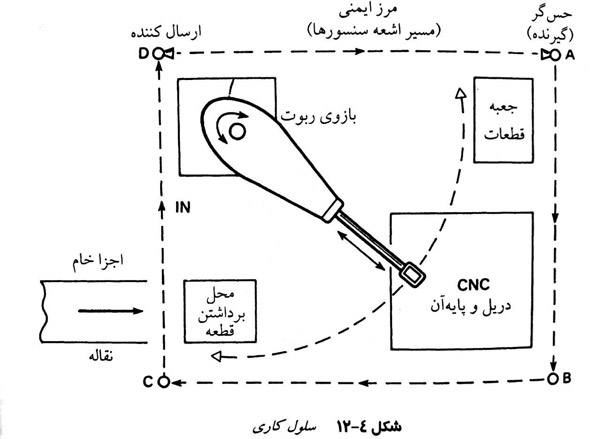
یک سلول کاری ( Work Cell ) محوطهای است که در آن گروهی از ماشینها با همکاری سازماندهی شده مناسب، با یکدیگر برای تولید یا توسط اجرای یک پروسه خاص کار میکنند.[ مجموعهای از چهار سنسور یا حسگر محصور شده است تا حضور افراد یا اشیاء وارده به سلول را نشان دهند (شکل ۴-۱۲) زمانی که هر یک از سنسورها تحریک شود، بایستی ادامه کار همه ماشینها در سلول کاری متوقف گردد تا اطمینان حاصل شود که هیچ گونه خسارتی به شخص یا شیء خلوتشکن نخواهد رسید. جهت ادامه کار پروسه، همه سنسورها یا حسگرها میبایستی سیگنال آمادگی یا “همه چیز مرتب است” (all CLear) را صادر کنند.
سنسور به کار رفته بسته به نوع آن ممکن است مجاورت اشیاء، حضور شعاع نوری یا اولتراسونیک و غیره را آشکار کند، اما هر گونه سنسوری که به کار رود بایستی سیستم را “ایمن از خطر” (fail-safe) نماید. بدین معنا که چنانچه عملکرد یک سنسور یا اجزاء مربوطه ناقص باشد، بایستی اجرای پروسه متوقف گردد. این هدف با طراحی صحیح برنامه کنترل PLC و ارتباطات مناسب قابل انجام است، به گونهای که تضمین شود چنانچه هر یک از حسگرها یا سنسورها معیوب گردند یا سیگنال حاکی از ورود اشیاء و افراد را به سلول کاری صادر کنند، ماشینها متوقف خواهند شد. بنابراین ما به برنامهای نیاز داریم که در طراحی آن این دو خصوصیت را درهم آمیزد.
سیستم نیازمند ۱۱ ورودی و ۴ خروجی است.
۴سنسور جهت سیگنالهای فعال کننده و عملکننده (X0-X3)
۴سنسور جهت سیگنالهای اعلام ورود افراد (X4-X7)
۳ ورودی دستی جهت شروع، توقف و ریست کردن سیستم اعلام خطر (X8-X10)
۳خروجی برای راهاندازی روبوت، مته CNC و نقاله (Y0-Y2) به علاوه:
۱خروجی برای اعلام خطر
برای درک نیازها و شرایط سیستم، ما به طور لفظی شرایط ویژه حاکم بر کار پروسه را ذکر کردیم. اکنون آنها را به شکل منطقی بیان خواهیم کرد. معادله اولیه، شرایط لازم جهت کار محرکها یا راهاندازها را بیان میدارد:
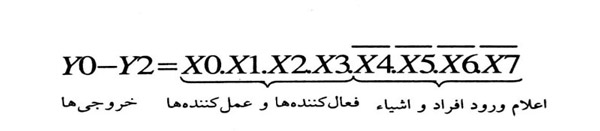
این معادله بیان میدارد که راهاندازها، زمانی فعالیت دارند که سنسورهای (X0-X3) یک سیگنال فعال عمل کننده را ارسال داشته و همچنین، سایر حسگرها (X4-X7) یک سیگنال منفی ورود (حاکی از عدم ورود افراد را) صادر کنند. جهت دستیابی به معادله برای ماشین های متوقف شده، به طور ساده معادله فوق را معکوس میکنیم.

خروجی اعلام خطر Y3 در صورتی فعال میشود که ماشینها به دلیل خرابی سنسور یا ورود افراد، متوقف شده باشند. پس میتوانیم بگوییم که: Y0-Y2=Y3
ما این شرایط را M1 خواهیم نامید. بنابراین:

این معادله قابل ساده شدن توسط قانون دومورگان میباشد. این قانون بیان میدارد: “خط تیره روی معادله را بشکنید و علامات منطقی را تغییر دهید.” در این حالت علامات از AND به OR تغییر مییابند.

و دو خط معکوسگر روی عبارات X4-X7 همدیگر را بیاثر میکنند و خواهیم داشت:

تعمق در این رویکرد، مشکلی را پیش خواهد کشید و آن این که اگر یک فرد یا شیء از حوزه عملکرد سنسور بگذرد و یا برعکس، چیزی در مسیر سنسور باقی بماند، تکلیف چیست؟ این امر موجب خواهد شد که عملیات متوقف شده و با ورود فرد به سلول کاری یا باقی ماندن در مسیر سنسور، سیستم مجدداً شروع به کار کند. برای رفع این نقیصه، نیاز به یک خودنگهدارنده یا مدار حافظه داریم که تا زمانی که کلید دستی ریست (کنتاکت X10) توسط اپراتور فشار داده نشود، سیستم اعلام خطر را فعال نگاه دارد. در این جا کنتاکتی از M1 به عنوان خودنگهدارنده استفاده می شود و خواهیم داشت:

جاهای دیگری از برنامه نیز از سوئیچهای دستی به عنوان (X9 . X8) start/stop استفاده شده است. یک خودنگهدارنده مقابل کلید فشاری استارت قرار دارد و زمانی که این کلید فشار داده شده و سپس آزاد میگردد، مسیر را همچنان بسته نگه میدارد. علاوه بر آن توسط کنتاکت های معمول باز رله کمکی S، خروجی ها را فعال می سازد. کلید stop همانگونه که در شکل ۴-۱۳ ملاحظه می کنید، این مسیر را قطع می کند. بنابراین معادله منطقی لازم برای مدار کامل start/stop عبارت از خواهد بود.
در عمل مدار منطقی کنترل مستقیماً بر روی کویل های خروجی عمل نمی کند ، بلکه این کار توسط رله های کمکی واسطه صورت می گیرد. این راهکار سبب سادگی طرح نردبانی شده و خوانایی آن را بالا می برد. در این جا ما از یک نشانهگر M1 به عنوان واسطه استفاده کردهایم. (به خاطر داشته باشید که بر خلاف توابع و عناصر سختافزاری، توابع و رلههای درونی میتوانند به هر تعداد مورد نیاز، کنتاکت داشته باشند.)
بایستی اضافه شود که یک برنامه کنترلی کامل برای کاربردی مشابه، به مقادیر بیشتری از المانهای منطقی واسطه جهت بر عهده گرفتن سایر وظایف و شرایطی که در سلول کاری اتفاق خواهد افتاد، نیازمند است: مثلاً در مورد معایب و خرابیهای ماشین، که نیار است کار دستگاههای سلول متوقف شود. همچنین توالی سازی و ترتیببندی کار عناصر درون سلول کاری (روبوت، متهCNC و نقاله) توسط همین برنامه کنترل می شود که نتیجتاً برای راهاندازی خروجی، پیچیدگی بیشتری از آنچه در شکل ۴-۱۳ نشان داده شده است را برای مدار نردبانی به ارمغان می آورد.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
گذاشتن کامنت