
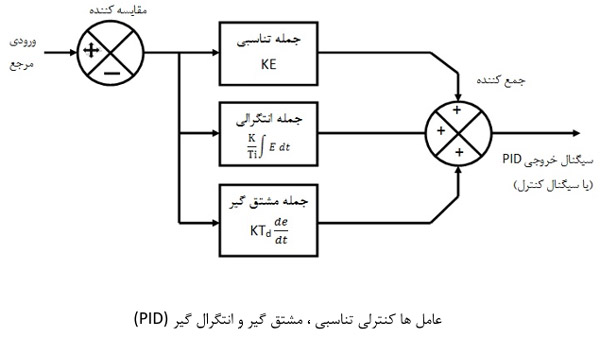
در اتوماسیون زیمنس عامل انتگرالی ، یک سیگنال خروجی متناسب با انتگرال زمانی سیگنال خطا را ، تولید می کند به این معنی که خروجی متناسب با مجموع خطای از لحظه اولیه تا یک لحظه مورد نظر t می باشد. از این عامل برای غلبه بر خطای حالت ماندگار استفاده می شود ، زیرا جمله انتگرالی همواره خروجی معادل خطا ، تولید خواهد کرد. یعنی مادامی که سیگنال خطا صفر نباشد ، خروجی انتگرال گیر تغییر خواهد کرد. زمانی که خطای اندازه گیری شده برابر صفر می شود ( خطای حالت ماندگار به وجود آمده در این حالت ، تنها ناشی از عامل تناسبی است ) در این لحظه خروجی انتگرال گیر برابر خطای حالت ماندگار خواهد شد که آن را خنثی کرده و سیستم را به سمت پایداری رهنمون می شود. همانگونه که ذکر شد معمول است که از سه عامل تناسبی ، مشتق گیر و انتگرالی در یک کنترل کننده استفاده شود که به آن کنترل PID گفته می شود و یکی از پر استفاده ترین روش های کنترل در صنعت امروزی می باشد.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
گذاشتن کامنت